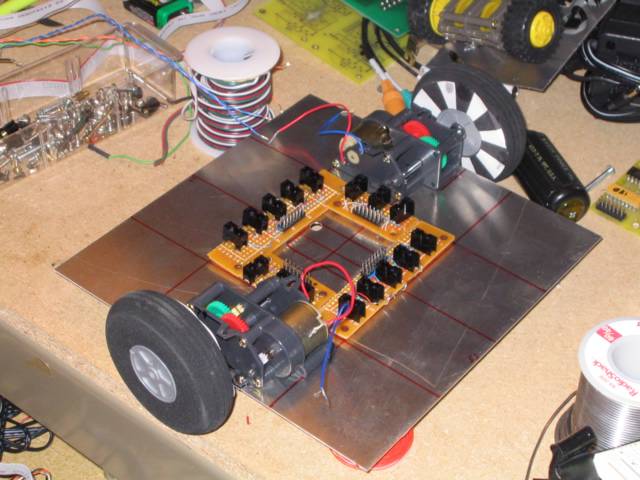
This is the underside of my maze robot. You can see I'm using those crazy Tamiya gearbox and motor assemblies. They work OK really. Tom G. gave me a couple of swank gearhead motors to use for this bot but they turned out to be a touch too wide with those line sensors set in the middle as they are. I have to be no more than 11" wide. Anyway, the center circuits are my line sensor arrays. Each black box is a PCB mount package with one IR LED and one IR phototransistor. I soldered wire-wrap wire to bring each sensor package upto the 14-pin headers. Soldering to the headers was hard. The boards took a long time to make. I really need to get a better technique. I really need to take another stab at not screwing up board etching. :)
Posted by Hello
No comments:
Post a Comment