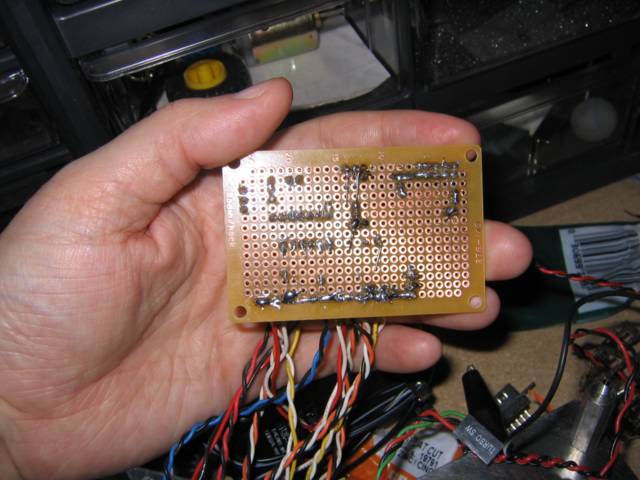
You can kind of see the problem. I find these single pad perfboards quite difficult to solder up decently. It is the interconnects that are so tedious and my technique is ugly ugly. And, as I mentioned before... it takes forever. I had another issue like this with a similar type of board, where my max 232 circuit would only work reliably at 110 baud. In contrast I have had great luck tranfering solderless breadboard circuits to schematic-to-layout editors to pro made PCBs. The two mistakes I've made with that technique are drilling holes too small and running tracing too thin for the current I expected them to carry. Both issues could be found and patched pretty easily. The issue is that the PCBs were professionally made boards and expensive. If I can get to the point where I can make my own one-off PCBs for a reasonable cost, I think I will be golden. I'll sure give it a shot next year. Hope everyone has good new year!
Posted by Hello